Wiki

Convention
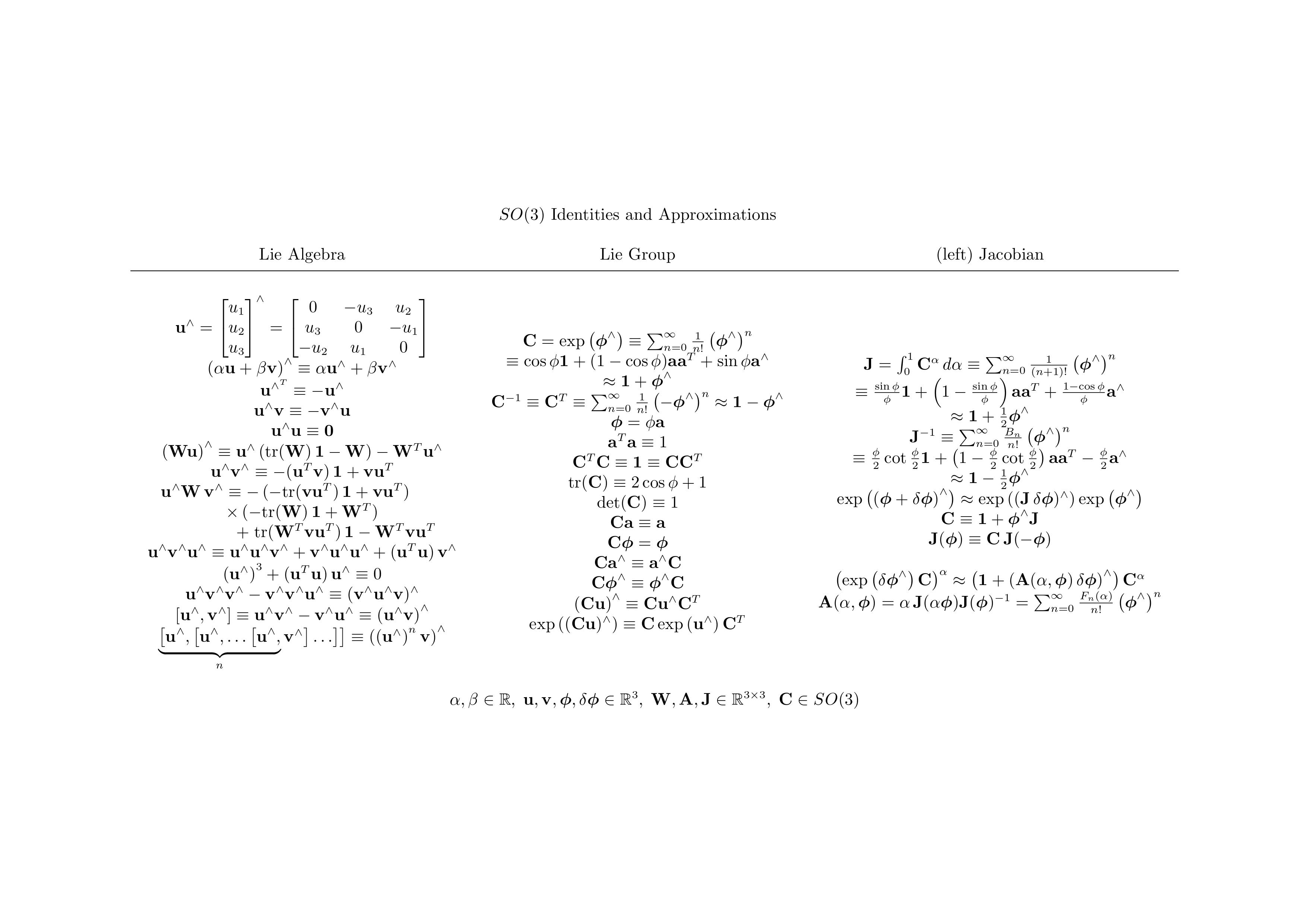
Lie Group - Lie Algebra
- Lie algebra / group is defined as follows. Note:
translationin Lie Algebra is not equal to the translation \(\mathbf{t}\) in Lie group.
- Operators as introduced in sec. 7.1.8 1
- Adjoint (\(6 \times 6\))
- Approximation of pose
- \[\mathbf{Sim}(3)\]
| Variable | Meaning |
|---|---|
| \(\mathbf{p} \in \mathbb{R}^{4}\) | homogeneous coordinates |
| \(\varepsilon \in \mathbb{R}^{3}\) | \(3\times 1\) vector |
| \(\eta\) | scalar |
| \(\boldsymbol{\xi} \in \mathbb{R}^{6}\) | lie algebra (e.g. pose) |
Huber Cost Function 2
\[\begin{aligned} C(\delta) &=\delta^{2} \text { for }|\delta|<b \\ &=2 b|\delta|-b^{2} \text { otherwise } \end{aligned}\]where \(\delta\) is the residual, \(b\) is the threshold.
Through simple conversions, we can obtain a formulation which is more suitable for Jacobian computation,
\[C(\delta) = \lambda (2 - \lambda) \delta^{2}\]where
\[\begin{aligned} \lambda &= 1 \text { for }|\delta|<b \\ &= \frac{b}{\left | \delta \right |} \text { otherwise } \end{aligned}\]In this way, the residual is converted from \(\delta\) into \(\omega_{h} \left | \delta \right |\)
The coefficient \(\omega_{h} = \sqrt{\lambda (2 - \lambda)}\) will be called Huber weight in the following sections.
Reprojection Error (Pinhole)
The reprojection error is defined as follows
\[\mathbf{r} = \mathbf{p} - \mathbf{K}\mathbf{T}_{iw}\mathbf{x} = \mathbf{p} - \mathbf{K}\mathbf{p}_{c}\]Note: In the cost function above, there is an implicit conversion to ensure the last element of homogeneous pixel coordinates to be one.
| Variable | Meaning |
|---|---|
| \(\mathbf{r}= \begin{bmatrix}\delta u \\ \delta v\end{bmatrix}\) | reprojection error |
| \(\mathbf{p}=\begin{bmatrix} u \\ v\end{bmatrix}\) | corresponding pixel |
| \(\mathbf{K}=\begin{bmatrix}f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}\) | calibration matrix |
| \(\mathbf{T}_{iw} = \begin{bmatrix}\mathbf{R} & \mathbf{t}\end{bmatrix}\) | camera pose (to optimize) |
| \(\mathbf{x}\) | 3D point (to optimize) |
| \(\mathbf{p}_{c} = \begin{bmatrix}x_{c} \\ y_{c} \\ z_{c}\end{bmatrix}\) | 3D point in the camera \(i\)’s coordinate system |
3D point
\[\frac{\partial \mathbf{r}}{\partial \mathbf{x}} = \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} \frac{\partial \mathbf{p}_{c}}{\partial \mathbf{x}}\]Since \(\frac{1}{\rho} \begin{bmatrix} \hat{u} \\ \hat{v} \\ 1 \end{bmatrix} = \mathbf{K}\mathbf{p}_{c} = \begin{bmatrix}f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix}x_{c} \\ y_{c} \\ z_{c}\end{bmatrix} = \begin{bmatrix}f_x x_{c} + c_x z_{c} \\ f_y y_{c} + c_y z_{c} \\ z_{c}\end{bmatrix}\), where \(\rho\) is the inverse depth of the 3D point, we have then
\[\mathbf{r} = \begin{bmatrix}u - f_x \frac{x_{c}}{z_{c}} - c_x \\ v - f_y \frac{y_{c}}{z_{c}} - c_y\end{bmatrix}\]Therefore,
\[\frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} = \begin{bmatrix} -\frac{f_x}{z_c} & 0 & \frac{f_x x_c}{z_c^{2}} \\ 0 & -\frac{f_y}{z_c} & \frac{f_y y_c}{z_c^{2}} \end{bmatrix}\]Besides,
\[\frac{\partial \mathbf{p}_{c}}{\partial \mathbf{x}} = \frac{\partial (\mathbf{R}\mathbf{x} + \mathbf{t})}{\partial \mathbf{x}} = \mathbf{R}\]All in all,
\[\frac{\partial \mathbf{r}}{\partial \mathbf{x}} = \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} \frac{\partial \mathbf{p}_{c}}{\partial \mathbf{x}} = \begin{bmatrix} -\frac{f_x}{z_c} & 0 & \frac{f_x x_c}{z_c^{2}} \\ 0 & -\frac{f_y}{z_c} & \frac{f_y y_c}{z_c^{2}} \end{bmatrix}\mathbf{R}\]Absolute camera pose
\[\frac{\partial \mathbf{r}}{\partial \boldsymbol{\xi}_{iw}} = \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} \frac{\partial \mathbf{p}_{c}}{\partial \boldsymbol{\xi}_{iw}}\] \[\begin{aligned} \frac{\partial \mathbf{p}_{c}}{\partial \boldsymbol{\xi}_{iw}} &= \lim_{\delta \boldsymbol{\xi}_{iw} \rightarrow 0} \frac{\exp{(\delta \boldsymbol{\xi}_{iw})}^{\wedge}\mathbf{T}_{iw}\mathbf{x} - \mathbf{T}_{iw}\mathbf{x}}{\delta \boldsymbol{\xi}_{iw}} \\ &= \lim_{\delta \boldsymbol{\xi}_{iw} \rightarrow 0} \frac{(\mathbf{I} + \delta \boldsymbol{\xi}_{iw}^{\wedge})\mathbf{T}_{iw}\mathbf{x} - \mathbf{T}_{iw}\mathbf{x}}{\delta \boldsymbol{\xi}_{iw}} \\ &= \lim_{\delta \boldsymbol{\xi}_{iw} \rightarrow 0} \frac{\delta \boldsymbol{\xi}_{iw}^{\wedge}\mathbf{T}_{iw}\mathbf{x}}{\delta \boldsymbol{\xi}_{iw}} \\ &= \lim_{\delta \boldsymbol{\xi}_{iw} \rightarrow 0} \frac{(\mathbf{T}_{iw}\mathbf{x})^{\odot}\delta \boldsymbol{\xi}_{iw}}{\delta \boldsymbol{\xi}_{iw}} \\ &= (\mathbf{T}_{iw}\mathbf{x})^{\odot} \end{aligned}\]Reprojection Error (EUCM)
The reprojection error is defined as follows
\[\mathbf{r} = \mathbf{p} - \pi(\mathbf{T}_{iw}\mathbf{x}) = \mathbf{p} - \pi(\mathbf{p}_{c})\] \[\pi(\mathbf{p}_{c})=\begin{bmatrix} \hat{u} \\ \hat{v} \end{bmatrix}=\begin{bmatrix} f_{x} & 0 \\ 0 & f_{y} \end{bmatrix} \begin{bmatrix} x_{c} /(\alpha \rho+(1-\alpha) z_{c}) \\ y_{c} /(\alpha \rho+(1-\alpha) z_{c}) \end{bmatrix} + \begin{bmatrix} c_{x} \\ c_{y} \end{bmatrix}\] \[\mathbf{q}=\begin{bmatrix} x_{c} /(\alpha \rho+(1-\alpha) z_{c}) \\ y_{c} /(\alpha \rho+(1-\alpha) z_{c}) \\ 1 \end{bmatrix}\] \[\rho=\sqrt{\beta\left(x^{2}+y^{2}\right)+z^{2}}\]| Variable | Meaning |
|---|---|
| \(\mathbf{r}= \begin{bmatrix}\delta u \\ \delta v\end{bmatrix}\) | reprojection error |
| \(\mathbf{p}=\begin{bmatrix} u \\ v\end{bmatrix}\) | corresponding pixel in image \(i\) |
| \(\pi(\cdot)\) | calibration function |
| \(\mathbf{T}_{iw} = \begin{bmatrix}\mathbf{R} & \mathbf{t}\end{bmatrix}\) | camera pose (to optimize) |
| \(\mathbf{x}\) | 3D point (to optimize) |
| \(\mathbf{p}_{c} = \begin{bmatrix}x_{c} \\ y_{c} \\ z_{c}\end{bmatrix}\) | 3D point in the camera’s coordinate system |
3D point
\[\frac{\partial \mathbf{r}}{\partial \mathbf{x}} = \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} \frac{\partial \mathbf{p}_{c}}{\partial \mathbf{x}}\] \[\begin{aligned} \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} &= \frac{\partial \mathbf{r}}{\partial \mathbf{q}} \frac{\partial \mathbf{q}}{\partial \mathbf{p}_{c}} = \frac{\partial \mathbf{q}}{\partial \mathbf{p}_{c}} \\ &= -\begin{bmatrix} f_x & 0 \\ 0 & f_y \end{bmatrix} \begin{bmatrix} \frac{1}{\eta}-\frac{\alpha \beta x_{c}^{2}}{\eta^{2} \rho} & -\frac{\alpha \beta x_{c} y_{c}}{\eta^{2} \rho} & -\frac{x_{c}\left(1-\alpha+\left(\alpha z_{c}\right) / \rho\right)}{\eta^{2}} \\ -\frac{\alpha \beta x_{c} y_{c}}{\eta^{2} \rho} & \frac{1}{\eta}-\frac{\alpha \beta y_{c}^{2}}{\eta^{2} \rho} & -\frac{y_{c}\left(1-\alpha+\left(\alpha z_{c}\right) / \rho\right)}{\eta^{2}} \end{bmatrix} \end{aligned}\]Besides,
\[\frac{\partial \mathbf{p}_{c}}{\partial \mathbf{x}} = \frac{\partial (\mathbf{R}\mathbf{x} + \mathbf{t})}{\partial \mathbf{x}} = \mathbf{R}\]Absolute camera pose
\[\frac{\partial \mathbf{r}}{\partial \boldsymbol{\xi}_{iw}} = \frac{\partial \mathbf{r}}{\partial \mathbf{p}_{c}} \frac{\partial \mathbf{p}_{c}}{\partial \boldsymbol{\xi}_{iw}}\] \[\frac{\partial \mathbf{p}_{c}}{\partial \boldsymbol{\xi}_{iw}} = (\mathbf{T}_{iw}\mathbf{x})^{\odot}\]Photometric Error (3D Point)
Camera Pose
3D Point
Photometric Error (Inverse Depth)
Camera Pose
Inverse Depth
Photometric Error (DSO)
Photometric Error (Plane)
Plane [a, b, c, d]
Pose Graph Error
SE(3)
- Residual \(\mathbf{r}_{ji} = \ln{(\bar{\mathbf{T}}_{ji} \mathbf{T}_{iw} \mathbf{T}_{jw}^{-1})^{\vee}}\)
| Variable | Meaning |
|---|---|
| \(\mathbf{r}_{ji} \in \mathbb{R}^{6}\) | single residual, 3 for translation, 3 for rotation |
| \(\bar{\mathbf{T}}_{ji}\) | measurement \(\mathbf{SE}(3)\) |
| \(\mathbf{T}_{iw}, \mathbf{T}_{jw}\) | variables to optimize (Lie group) |
| \(\boldsymbol{\xi}_{iw}, \boldsymbol{\xi}_{jw}\) | variables to optimize (Lie algebra) |
Sim(3)
- Residual \(\mathbf{r}_{ji} = \ln{(\bar{\mathbf{S}}_{ji} \mathbf{S}_{iw} \mathbf{S}_{jw}^{-1})^{\vee}}\)
| Variable | Meaning |
|---|---|
| \(\mathbf{r}_{ji} \in \mathbb{R}^{7}\) | single residual, 3 for translation, 3 for rotation, 1 for scale |
| \(\bar{\mathbf{S}}_{ji}\) | measurement \(\mathbf{Sim}(3)\) |
| \(\mathbf{S}_{iw}, \mathbf{S}_{jw}\) | variables to optimize (Lie group) |
| \(\boldsymbol{\xi}_{iw}^{s}, \boldsymbol{\xi}_{jw}^{s}\) | variables to optimize (Lie algebra) |
- \[\frac{\partial \mathbf{r}_{ji}}{\partial \boldsymbol{\xi}_{iw}}\]
- \[\frac{\partial\mathbf{r}_{ji}}{\partial \boldsymbol{\xi}_{jw}^{s}}\]