Manifold SLIC: A Fast Method to Compute Content-Sensitive Superpixel 1
Abstract
Superpixels are perceptually meaningful atomic regions that can effectively capture image features. Among various methods for computing uniform superpixels, simple linear iterative clustering (SLIC) is popular due to its simplicity and high performance. In this paper, we extend SLIC to compute content-sensitive superpixels, i.e., small superpixels in content-dense regions (e.g., with high intensity or color variation) and large superpixels in content-sparse regions. Rather than the conventional SLIC method that clusters pixels in \(\mathbb{R}^{5}\), we map the image \(I\) to a 2-dimensional manifold \(\mathcal{M} \subset \mathbb{R}^{5}\), whose area elements are a good measure of the content density in \(I\). We propose an efficient method to compute restricted centroidal Voronoi tessellation (RCVT) — a uniform tessellation — on \(\mathcal{M}\), which induces the content-sensitive superpixels in \(I\). Unlike other algorithms that characterize content-sensitivity by geodesic distances, manifold SLIC tackles the problem by measuring areas of Voronoi cells on \(\mathcal{M}\), which can be computed at a very low cost. As a result, it runs 10 times faster than the state-of-the-art content-sensitive superpixels algorithm. We evaluate manifold SLIC and seven representative methods on the BSDS500 benchmark and observe that our method outperforms the existing methods.
Introduction
Our key idea is to represent the image \(I\) as a 2-mainifold \(\mathcal{M}\) embedded in the combined color and image space \(\mathbb{R}^{5}\), on which the area elements are a good measure of content density in \(I\).
We develop an efficient algorithm to compute restricted CVT — a uniform tessellation — on \(\mathcal{M}\), which induces the conten-tsensitive superpixels in \(I\).
Unlike other algorithms that characterize content-sensitivity by geodesic distances, manifold SLIC addresses the problem by measuring areas of Voronoi cells on \(\mathcal{M}\), which can be computed at a very low cost.
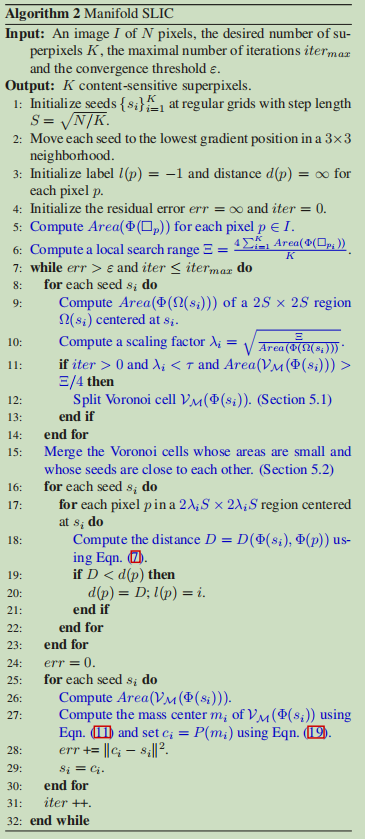
Algorithm
Structure-sensitive superpixels via geodesic distance 2
Abstract
Segmenting images into superpixels as supporting regions for feature vectors and primitives to reduce computational complexity has been commonly used as a fundamental step in various image analysis and computer vision tasks. In this paper, we describe the structure-sensitive superpixel technique by exploiting Lloyd’s algorithm with the geodesic distance. Our method generates smaller superpixels to achieve relatively low under-segmentation in structuredense regions with high intensity or color variation, and produces larger segments to increase computational efficiency in structure-sparse regions with homogeneous appearance. We adopt geometric flows to compute geodesic distances amongst pixels. In the segmentation procedure, the density of over-segments is automatically adjusted through iteratively optimizing an energy functional that embeds color homogeneity, structure density. Comparative experiments with the Berkeley database show that the proposed algorithm outperforms the prior arts while offering a comparable computational efficiency as TurboPixels. Further applications in image compression, object closure extraction and video segmentation demonstrate the effective extensions of our approach.
SLIC Superpixels Compared to State-of-the-art Superpixel Methods3
Abstract
Computer vision applications have come to rely increasingly on superpixels in recent years, but it is not always clear what constitutes a good superpixel algorithm. In an effort to understand the benefits and drawbacks of existing methods, we empirically compare five state-of-the-art superpixel algorithms for their ability to adhere to image boundaries, speed, memory efficiency, and their impact on segmentation performance. We then introduce a new superpixel algorithm, simple linear iterative clustering (SLIC), which adapts a k-means clustering approach to efficiently generate superpixels. Despite its simplicity, SLIC adheres to boundaries as well as or better than previous methods. At the same time, it is faster and more memory efficient, improves segmentation performance, and is straightforward to extend to supervoxel generation.
Existing superpixel methods
- Graph-based algorithms: Graph-based approaches to superpixel generation treat each pixel as a node in a graph. Edge weights between two nodes are proportional to the similarity between neighboring pixels. Superpixels are created by minimizing a cost function defined over the graph.
- NC054: The Normalized cuts algorithm recursively partitions a graph of all pixels in the image using contour and texture cues, globally minimizing a cost function defined on the edges at the partition boundaries.
- GS045: It performs an agglomerative clustering of pixels as nodes on a graph, such that each superpixel is the minimum spanning tree of the constituent pixels.
- SL086: Moore et al. propose a method to generate superpixels that conform to a grid by finding optimal paths, or seams, that split the image into smaller vertical or horizontal regions.
- GCa10 and GCb107: Superpixels are obtained by stitching together overlapping image patches such that each pixel belongs to only one of the overlapping regions. They suggest two variants of their method, one for generating compact superpixels (GCa10) and one for constant-intensity superpixels (GCb10).
- Gradient-ascent-based algorithms: Starting from a rough initial clustering of pixels, gradient ascent methods iteratively refine the clusters until some convergence criterion is met to form superpixels.
- MS028: mean shift, an iterative mode-seeking procedure for locating local maxima of a density function, is applied to find modes in the color or intensity feature space of an image.
- QS089: Quick shift also uses a mode-seeking segmentation scheme. It initializes the segmentation using a medoid shift procedure. It then moves each point in the feature space to the nearest neighbor that increases the Parzen density estimate.
- WS9110: The watershed approach performs a gradient ascent starting from local minima to produce watersheds, lines that separate catchment basins.
- TP0911: The Turbopixel method progressively dilates a set of seed locations using level-set based geometric flow.
SLIC Superpixels
- Algorithm 1: SLIC superpixel segmentation
![]()
- Distance measure
- The distance measure \(D\) computes the distance between a pixel \(i\) and cluster center \(C_k\) in Algorithm 1.
- A pixel’s color is represented in the CIELAB color space \([l \quad a \quad b]^T\), whose range of possible values is known.
- The pixel’s position is \([x \quad y]^T\).
- To combine the two distances into a single measure, it is necessary to normalize color proximity and spatial proximity by their respective maximum distances within a cluster, \(N_s\) and \(N_c\).
- The maximum spatial distance expected within a given cluster sphould correspond to the sampling interval, \(N_S = S = \sqrt{N/K}\). Determining the maximum color distance \(N_c\) is not so straightforward, as color distances can vary significantly from cluster to cluster and image to image. This problem can be avoided by fixing \(N_c\) to a constant \(m\) so that
- Post-processing
- SLIC does not explicitly enforce connectivity. At the end of the clustering procedure, some “orphaned” pixels that do not belong to the same connected component as their cluster center may remain. To correct for this, such pixels are assigned the label of the nearest cluster center using a connected components algorithm.
- Complexity
- The complexity of SLIC is linear in the number of pixels, irrespective of \(k\).
Turbopixels: Fast superpixels using geometric flows 11
Abstract
We describe a geometric-flow-based algorithm for computing a dense oversegmentation of an image, often referred to as superpixels. It produces segments that, on one hand, respect local image boundaries, while, on the other hand, limiting undersegmentation through a compactness constraint. It is very fast, with complexity that is approximately linear in image size, and can be applied to megapixel sized images with high superpixel densities in a matter of minutes. We show qualitative demonstrations of high-quality results on several complex images. The Berkeley database is used to quantitatively compare its performance to a number of oversegmentation algorithms, showing that it yields less undersegmentation than algorithms that lack a compactness constraint while offering a significant speedup over N-cuts, which does enforce compactness.
Algorithm
![]()
Literature
-
Y. Liu, M. Yu, B. Li and Y. He, “Intrinsic Manifold SLIC: A Simple and Efficient Method for Computing Content-Sensitive Superpixels,” in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 40, no. 3, pp. 653-666, 1 March 2018. ↩
-
Wang, Peng, et al. “Structure-sensitive superpixels via geodesic distance.” International journal of computer vision 103.1 (2013): 1-21. ↩
-
Achanta, Radhakrishna, et al. “SLIC superpixels compared to state-of-the-art superpixel methods.” IEEE transactions on pattern analysis and machine intelligence 34.11 (2012): 2274-2282. ↩
-
Shi, Jianbo, and Jitendra Malik. “Normalized cuts and image segmentation.” IEEE Transactions on pattern analysis and machine intelligence 22.8 (2000): 888-905. ↩
-
Felzenszwalb, Pedro F., and Daniel P. Huttenlocher. “Efficient graph-based image segmentation.” International journal of computer vision 59.2 (2004): 167-181. ↩
-
Alastair Moore, Simon Prince, Jonathan Warrell, Umar Mohammed, and Graham Jones. Superpixel Lattices. IEEE Computer Vision and Pattern Recognition (CVPR), 2008. ↩
-
O. Veksler, Y. Boykov, and P. Mehrani. Superpixels and supervoxels in an energy optimization framework. In European Conference on Computer Vision (ECCV), 2010. ↩
-
Comaniciu, Dorin, and Peter Meer. “Mean shift: A robust approach toward feature space analysis.” IEEE Transactions on pattern analysis and machine intelligence 24.5 (2002): 603-619. ↩
-
A. Vedaldi and S. Soatto. Quick shift and kernel methods for mode seeking. In European Conference on Computer Vision (ECCV), 2008. ↩
-
Luc Vincent and Pierre Soille. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. IEEE Transactions on Pattern Analalysis and Machine Intelligence, 13(6):583–598, 1991. ↩
-
A. Levinshtein, A. Stere, K. Kutulakos, D. Fleet, S. Dickinson, and K. Siddiqi. Turbopixels: Fast superpixels using geometric flows. IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 2009. ↩ ↩2